倍福控制技术在高压直流输电系统中的应用
直流输电的基本原理
直流输电方式使用两个带公共直流母线的变流器。每个变流器都能够灵活地将电网中的交流电转换成直流电传输到直流母线中,也能够将直流母线中的直流电转换成交流电回馈到电网中。这样就可以在两个电网之间以任意方向传输电能。直流母线中使用的是特高压直流输电,系统因此得名为高压直流(HVDC)输电系统。作用类似于阀门的晶体管被称为绝缘栅双极型晶体管(IGBT),用于实现电流的转换。晶体管可以控制电流的通断,然后通过控制晶体管的通断生成所需的电流曲线。
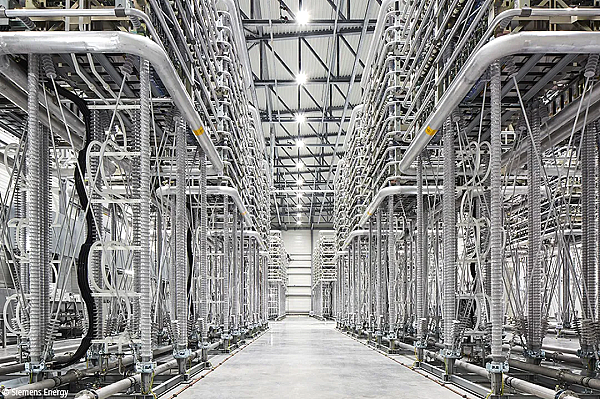
然而,高压直流输电系统的变流器与传统变流器的尺寸设计是不同的。这是因为它采用了由数百个 IGBT 组成的模块化多电平换流器(MMC),并部署在 10 至 15 公顷的区域内。直流母线使用 100 至 800 kV 电压,可在数百公里的距离内传输 500 至 6400 MW 的电力。
全新的大功率变流器控制解决方案
嵌入式控制器、EtherCAT I/O 端子模块以及 TwinCAT 自动化软件,结合基于模型的设计,更好地控制和保护大功率变流器。这些变流器不仅构成了高压直流输电系统的基石,而且还可用于补偿无功功率以及支撑和稳定电网(柔性交流输电系统,FACTS)的系统。
为了确保电网这一重要部分的高可靠性,通常会使用冗余系统。硬件和软件中的控制和保护系统始终处于热备用模式,以便在发生故障时能够立即切换到冗余系统。为了实现这一点,根据 IEC 62439-3 标准,采用 TwinCAT Parallel Redundancy Protocol (PRP) 技术,通过多个独立的以太网网络建立冗余通信。通过这种方法,嵌入式控制器不仅能够利用 EtherCAT 自动化协议 (EAP) 实现彼此之间的高效通信,而且还能通过符合 IEC 61850 标准的 MMS 和 GOOSE 协议与断路器等外部系统通信。
快速响应和安全运行
使用 EtherCAT 和高性能嵌入式控制器,可以有效满足更高等级的电流和电压控制对快速响应时间的要求。由于 CX2043 嵌入式控制器搭载的是 AMD Ryzen™ 处理器,因此 TwinCAT 能够以 250 µs 的周期时间和极小的抖动执行控制任务。每个变流器最多可使用 12 台这样的嵌入式控制器,它们通过EtherCAT 桥接端子模块 EL6695 在冗余段中快速交换信号。
操作系统选用的是 TwinCAT/BSD,以确保作为关键基础设施核心组成部分的系统能够实现安全无忧的操作。它为 TwinCAT 3 Runtime 提供了一个高效、稳定的 Unix 平台,同时也充分满足了当前及未来日益增长的安全需求。随后,TwinCAT 模块在 TwinCAT 3 Runtime 中执行。直接在 C/C++ 中开发的 TwinCAT 模块用于基础功能或特殊通信堆栈。通过这些模块,可以将控制软件从硬件细节或通过 EtherCAT 或 IEC 61850 等各种协议进行的通信过程中抽离出来。然后,使用 MATLAB® 和 Simulink® 中基于模型的开发方法配置系统的特定功能和控制,并通过代码自动生成技术将其传输到嵌入式控制器。
集成、开放的软件
由于这类高压直流输电系统无法作为物理系统进行开发和验证,因此通过仿真进行早期测试至关重要。在过去,这些测试需要在多个不同的仿真环境中进行,通常要求将控制和保护软件手动转换到每一个环境中。这种手动转换过程不仅容易出错且耗时,还难以实现所有环境中控制行为的一致性和可比性。

 津公网安备12010102000945号
津公网安备12010102000945号